-
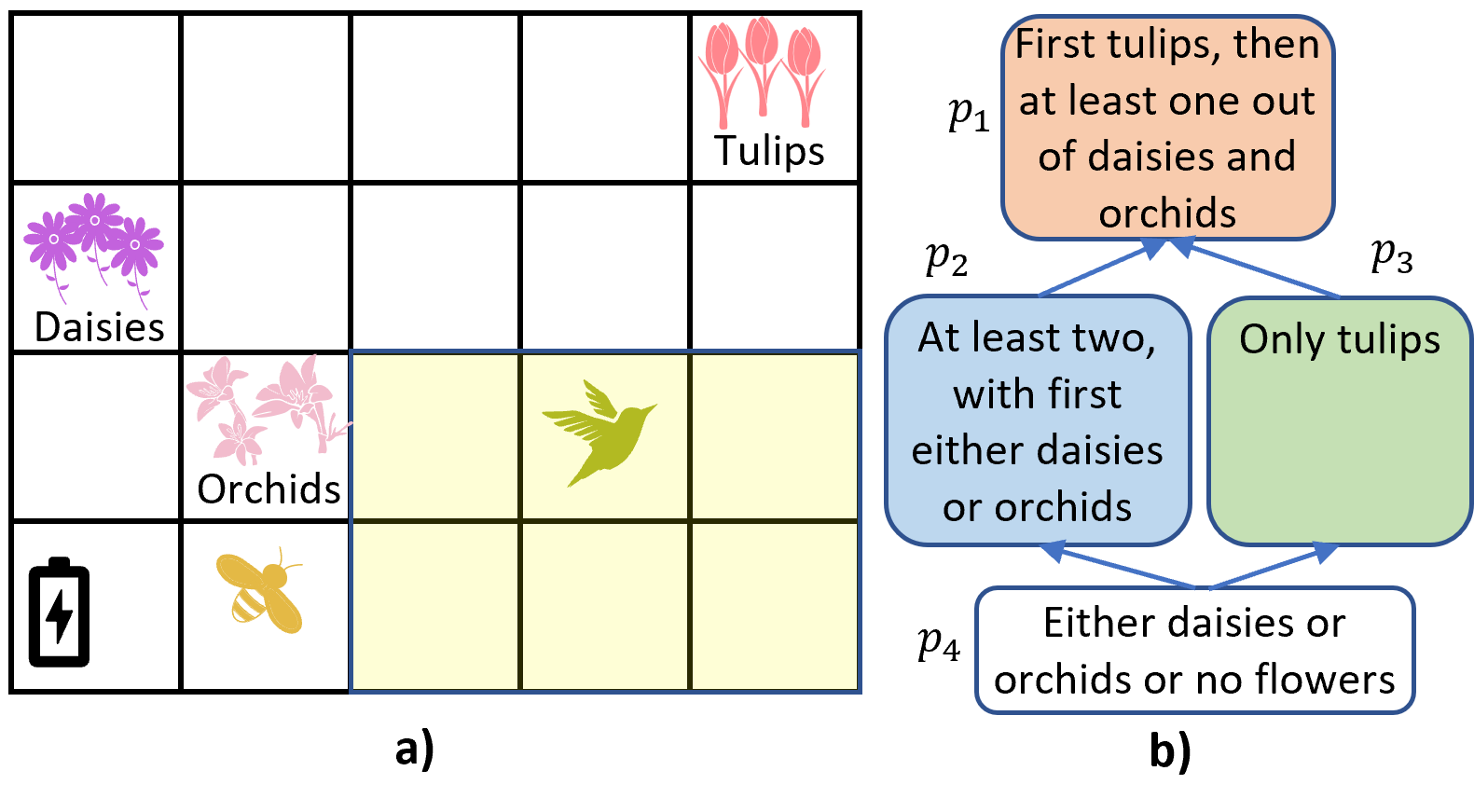
Preference-based planning: This project aims to develop algorithms and theories for preference-aware decision-making in stochastic and dynamic environments with complex temporal mission objectives. The goal is to equip robots with human-like intelligence to make satisfactory plans in a timely manner, where there might be more than one way to accomplish a mission or where the robot must accomplish a set of conflicting missions.
|
 |
-
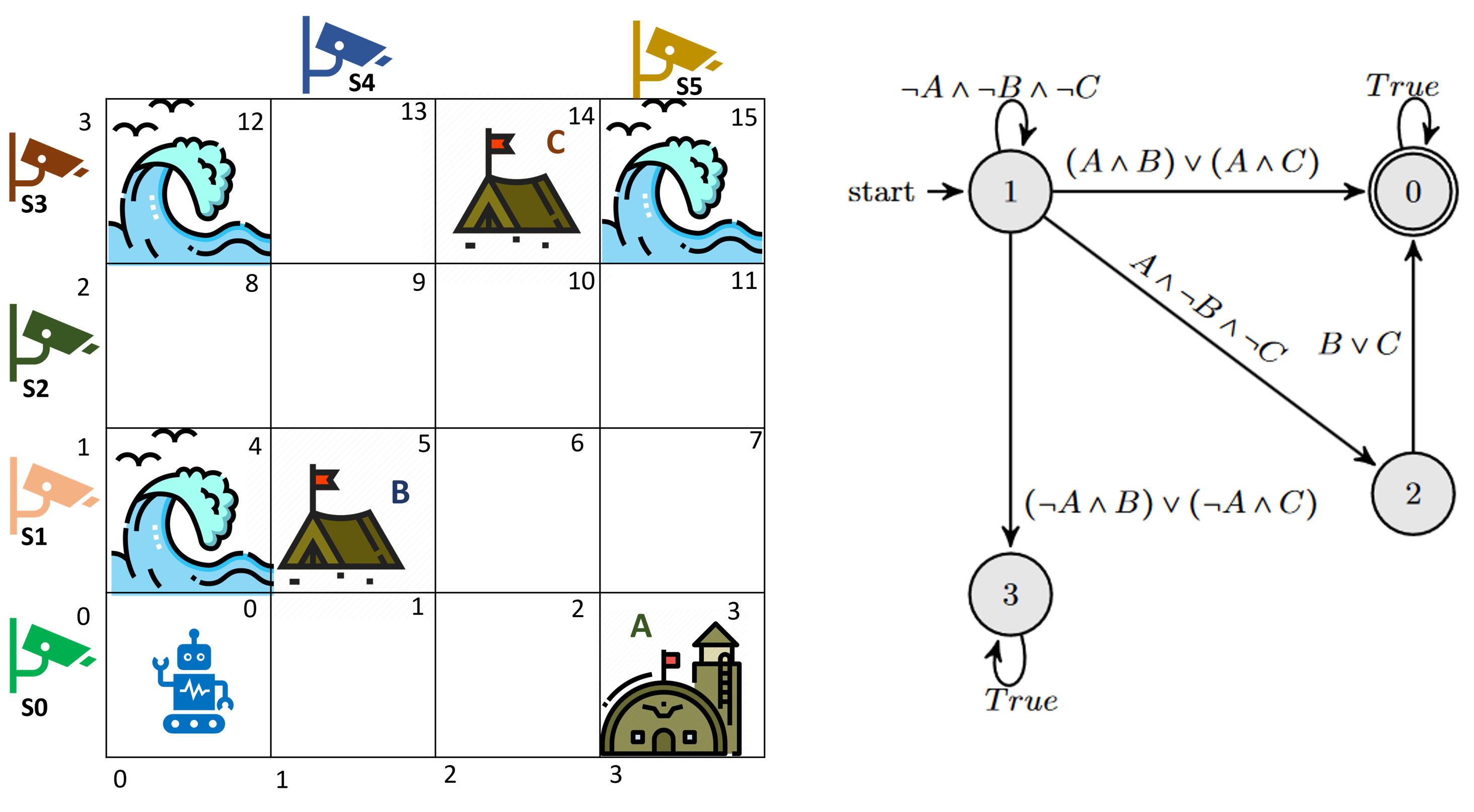
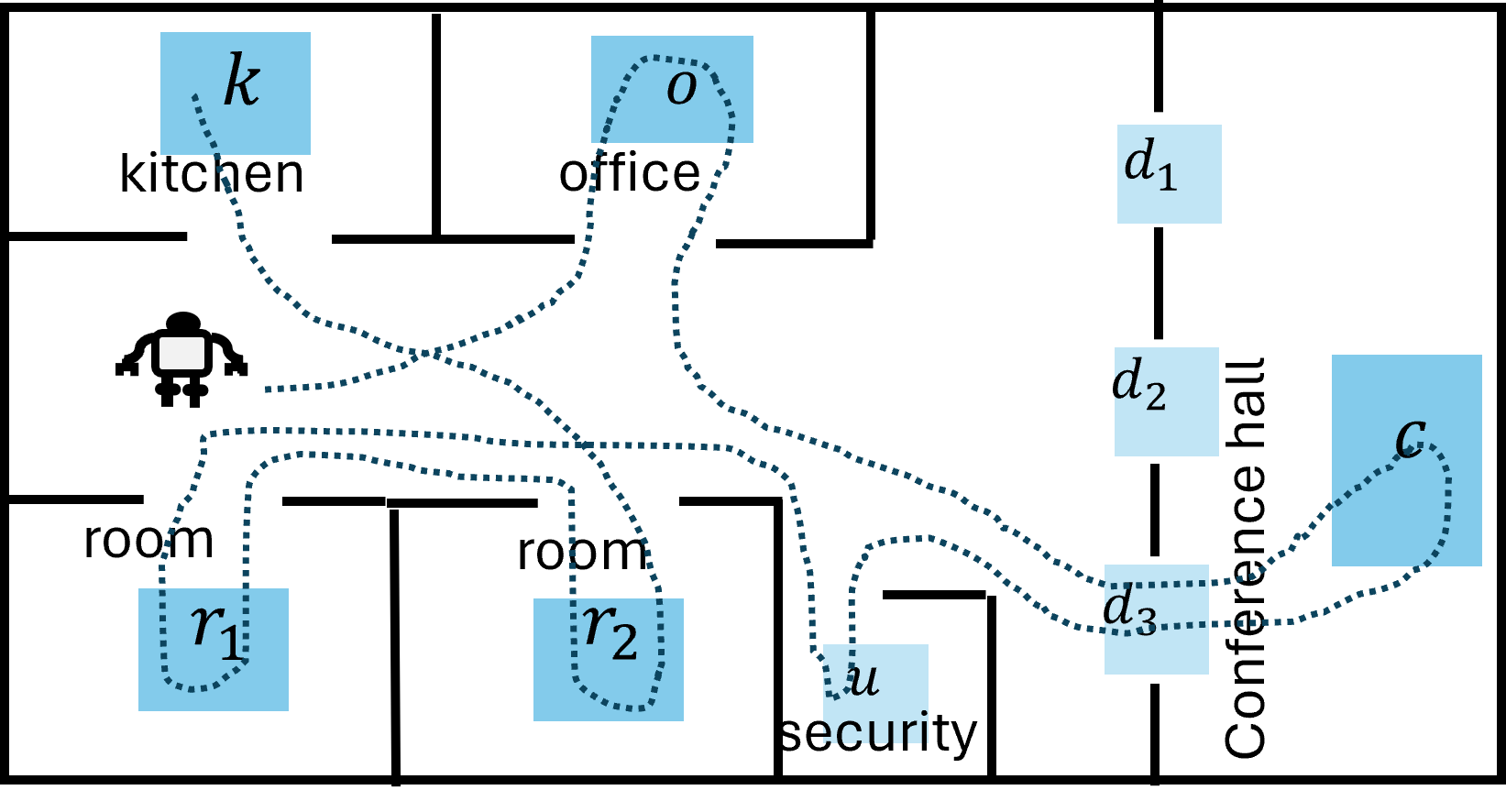
Sensor selection:
This project focuses on the problem of choosing an optimal selection from a set of feasible sensors in the environment to ensure that an agent commits to a pre-disclosed itinerary. This problem is useful in security and surveillance applications, and is also applicable in contexts where one wants to test a hypothesis about the behavior of a robot or a system.
|
 |
-
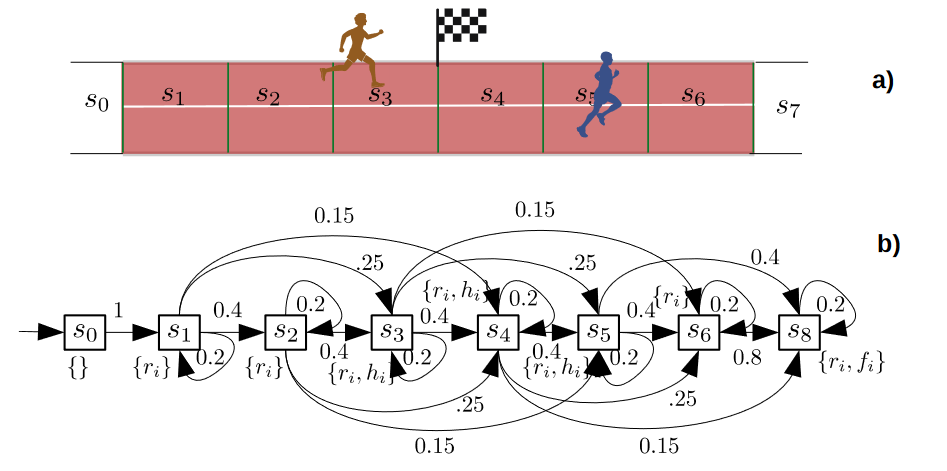
Opacity-enforcing planning: The aim of opacity enforcement is to confuse an outsider who generally knows the system model and observes the system execution, regarding whether the system has realized a secret behavior or has reached a secret state. This project focuses on planning to accomplish temporally extended goals in stochastic environments while enforcing opacity.
|
 |
-
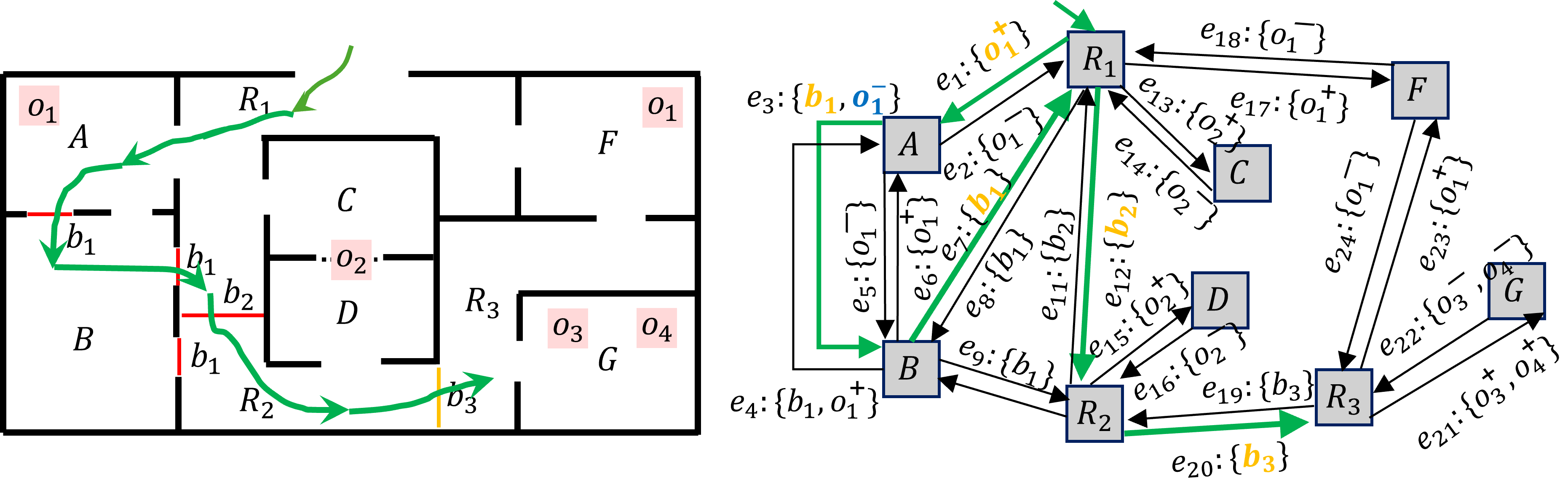
Planning to chronicle: This project focuses on the idea of deploying robots to observe a stochastic process in order to capture a sequence of events that meets specifications given by the user. This idea can be used in applications where we want to use robots to autonomously make a video or a documentary of events that happen unpredictably in an environment. The project proposes mathematical modeling for that purpose and solves in that context, several optimization problems, such as the problem of minimizing the expected time to record a desired video.
|
 |
-
Temporal logic planning with soft constraints: Temporal logics, which offer high-level, user-friendly languages for specifying complex missions and tasks, have become very useful tools for planning in robotics. This project develops theories and algorithms for temporal logic planning with soft constraints, within the context of using robots to chronicle events that happen unpredictably in stochastic environments. The aim is to enable robots to autonomously and in a timely manner decide which specifications to violate, particularly in cases where the specifications are inconsistent and cannot be satisfied altogether.
|
 |
-
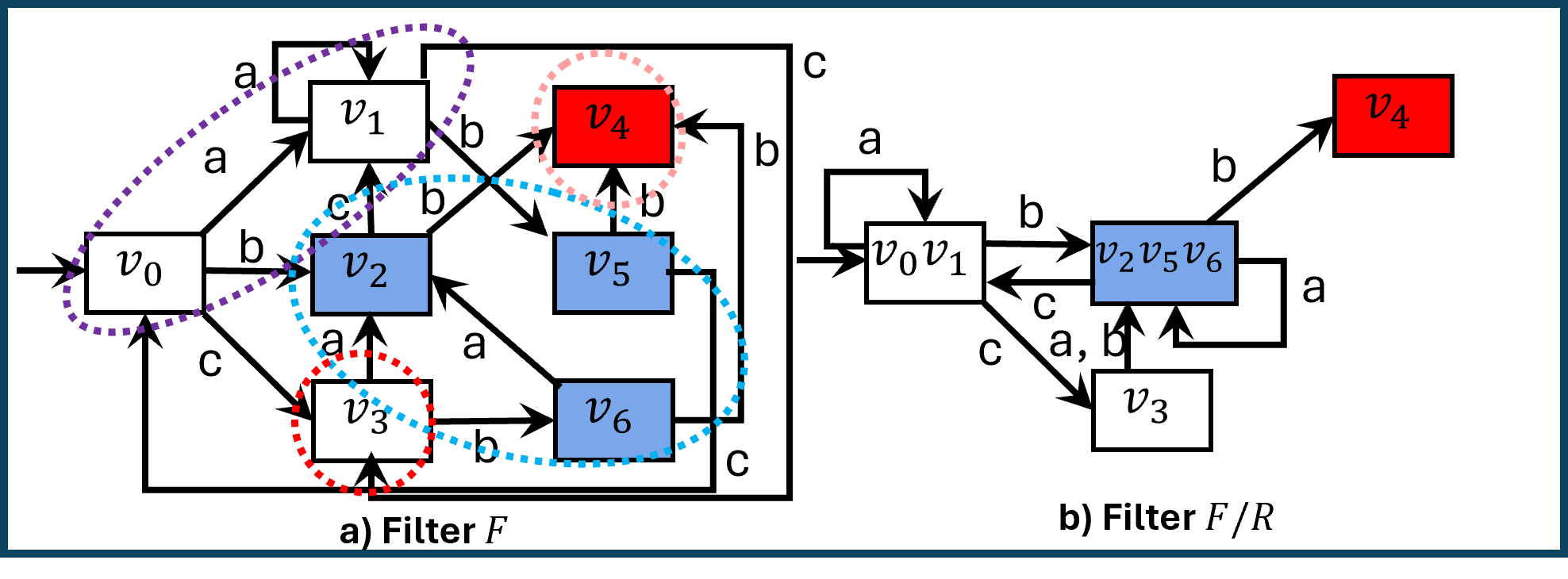
State space reduction of combinatorial filters: Combinatorial filters are formal structures used for filtering, reasoning, and planning in systems that deal with discrete sensory data. This project studies exact and approximate solutions to the NP-hard problem of state space minimization of such kind of filters.
|
 |
 Address: Cheek Hall #134
Address: Cheek Hall #134